Transportol ulaglaryna bolan islegiň çalt ösmegi bilen, aşa köp ýüklenen ulaglar ýollara, köprülere, tunellere we umumy ulag howpsuzlygyna uly töwekgelçilik döredýär. Böleklere bölünen maglumatlar, pes netijelilik we haýal jogap sebäpli adaty artykmaç ýükleýiş dolandyryş usullary häzirki zaman kadalaşdyryjy talaplary kanagatlandyryp bilmeýär. Muňa jogap edip, kompaniýamyz ösdürdiAkylly artykmaç ýük dolandyryş dolandyryş maglumat ulgamymerkezleşdirilen maglumatlary ýygnamagy, dinamiki dolandyryşy, real wagt deňeşdirmesini, akylly derňewi we awtomatiki gaýtadan işlemegi gazanmak üçin maglumat tehnologiýalaryny, torlaýyn we akylly tehnologiýalary ulanmak. Bu ulgam, ýol hereketini dolandyrmak edaralaryna aşa ýüküň üstünden gözegçilik etmek, ýol howpsuzlygyny we infrastrukturanyň berkligini üpjün etmek üçin netijeli we takyk gurallar bilen üpjün edýär.
Ulgamymyz, doly derejeli, doly zynjyrly we doly sebitde artykmaç ýük gözegçiligi we gözegçilik gurluşyny gurup, milli derejedäki çarçuwada düzülendir. Çeşme stansiýalarynyň, kesgitli ýollaryň, ykjam ýollaryň ýerine ýetirilişiniň we milli merkezi dolandyryş merkeziniň arasynda özara baglanyşyk we maglumatlary paýlaşmaga mümkinçilik berýär, çeşmäni ýüklemekden ýol hereketine we ýerine ýetirişe çenli doly prosesli kadalaşdyryjy model döredýär. Tehnologiki gözegçilik, maglumat hyzmatdaşlygy we ýapyk görnüşli ýerine ýetiriş arkaly ulgam çeşmedäki artykmaç ýüklere netijeli gözegçilik edýär, ýollaryň hyzmat möhletinde galmagyny üpjün edýär, düzgünleşdirilen ulag amallaryny we adalatly tölegleri öňe sürýär, ulag infrastrukturasyny we milli bähbitleri goraýar.
Umumy ulgam dört sany esasy funksional moduldan durýar: Çeşme stansiýasynyň artykmaç ýük gözegçiligi ulgamy, kesgitlenen ýüküň aşa ýüklenişine gözegçilik ulgamy (awtoulag ýollary + milli, welaýat, şäher we etrap ýollary), ykjam ýoluň aşa ýük gözegçiligi ulgamy we tölegleri dolandyrmak ulgamy. Bu modullar, ähli ýol ulgamyny we ähli ssenariýalary öz içine alýan giňişleýin gözegçilik ulgamyny döretmek üçin utgaşdyrylýar.
Birinji bölüm: Çeşme stansiýasynyň artykmaç ýük dolandyryş ulgamy
Çeşme stansiýasynyň artykmaç ýük dolandyryş ulgamynyň esasy maksady, gelip çykýan stansiýalardan çykýan aşa köp awtoulaglary azaltmak ýa-da ýok etmekdir. Esasy maksatlar minalardan, portlardan, howa menzillerinden, logistika seýilgählerinden, zawodlardan we ulag kompaniýalaryndan ulaglary öz içine alýar. Üznüksiz, 24/7 gözegçilik ulaglaryň çeşmede ýüklemek düzgünlerine laýyk gelmegini üpjün edýär.
1. Sekiz platforma dinamiki ulag agramy ulgamy
Gözegçilik edilýän ýerleriň çykyşlarynda, sekiz platforma dinamiki ulag agramy ulgamy, köpçülikleýin ýollara girmezden ozal ulaglaryň aşa köp ýüklenmegini anyklamak üçin ýerleşdirilýär. Bu ulgam aşakdakylardan ybarat:
Sekiz platforma elektron ulag terezisi- Ulagyň agramyny we ululygyny dinamiki kesgitlemek üçin ýokary takyklykly ýük öýjüklerini, ok sanlaryny we aralygy tanamak, ulagyň ölçegini ölçemek we optiki raster bölünişigini ulanýar.
Pilotsyz agramy dolandyrmak ulgamy- Ulaglary awtomatiki kesgitlemek, maglumatlary ýygnamak, artykmaç ýagdaýy kesgitlemek we goýberilişi dolandyrmak üçin önümçilik kompýuterlerini, agramy dolandyryş programma üpjünçiligini, gözegçilik kameralaryny, LED displeý ekranlaryny, ses görkezmelerini, akylly dolandyryş şkaflaryny we ulgam ulgamlaryny öz içine alýar.
Amal iş tertibi: Ulaglar ýüklenenden soň agram meýdanyna girýär. Ulgam awtomatiki usulda agramy we ölçegleri ölçäp, tassyklanan ýük çäkleri bilen deňeşdirýär. Gabat gelýän ulaglar awtomatiki usulda goýberilýär, artykmaç ýüklenen ulaglar bolsa standartlara laýyk gelýänçä düşürilmeli. Ulgam, sebitdäki hökümet platformalary bilen maglumatlary paýlaşmaga we uzakdan gözegçilik etmäge mümkinçilik berýär, çeşmäniň aşa ýüklenmegine gözegçilik etmegiň hakyky wagtda görünmegini üpjün edýär.
2. Uçardaky ulag agramy ulgamy
Dinamiki gözegçiligi hasam gazanmak üçin ulaglar, bortdaky ulag agramy ulgamy bilen enjamlaşdyrylandyr, statiki we dinamiki ulaglaryň ýüklerine hakyky wagtda gözegçilik etmäge ukyply. Ulgam bortda agram salýan programma üpjünçiligini, akylly gurallaryň displeýlerini we agram birliklerini (lazer aralygy ýa-da ştamm ölçeg görnüşi) öz içine alýar, bu sürüjilere häzirki ýükleri görmäge we ýüklenende duýduryşlary almaga mümkinçilik berýär. Artykmaç ýüklenen ulaglar, şol bir wagtyň özünde flot dolandyryş platformalaryna we hökümet ulgamlaryna maglumatlar ýüklenýär we zerur bolsa awtomatiki usulda artykmaç habarnamalary ýa-da jerimeleri döredýär.
Ulgam ýaprak çeşmeleriniň, oklaryň ýa-da howa süspansiýalarynyň deformasiýasyna gözegçilik etmek üçin asma ýük öýjüklerini ulanýar we ýük modellerini gurmak üçin ýapyk görnüşli “many - kalibrlemek, hasaplamak - ulanmak” usulyýetini ulanýar. Programma üpjünçiligi algoritmleri, ölçeg takyklygyny üpjün edip, daşky gurşaw faktorlarynyň öwezini dolýar. Statiki agram takyklygy ± 0,1% ~ ± 0,5%, gytaklaýyn agram takyklygy amatly dolandyryş we töwekgelçilik duýduryşlary üçin amatly şertlerde ± 3% ~ ± 5% -e ýetýär.
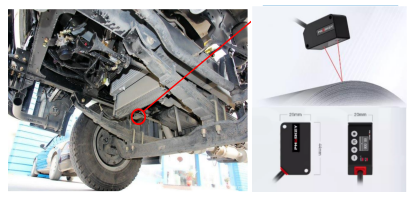
Asma gurnalan çarçuwanyň deformasiýasy lazer aralyk ölçeg ulgamy

Asma oturdylan çarçuwanyň deformasiýasyÖýjük
Sekiz platforma dinamiki ulag agramy ulgamyny bortdaky ulag agramy ulgamy bilen birleşdirip, ulaglar öz-özüni barlap bilerler, flotlar öz-özüni barlap bilerler we häkimiýetler ýol hereketiniň howpsuzlygyny we uzak möhletli infrastrukturanyň durnuklylygyny üpjün edýän doly integrirlenen, hakyky wagtda aşa köp gözegçilik dolandyryş modelini döredip, ähli prosese gözegçilik edip bilerler.
Iş wagty: Dekabr-09-2025